ロボット大回転レストア(9) [ロボット大回転]
【足の補修2】
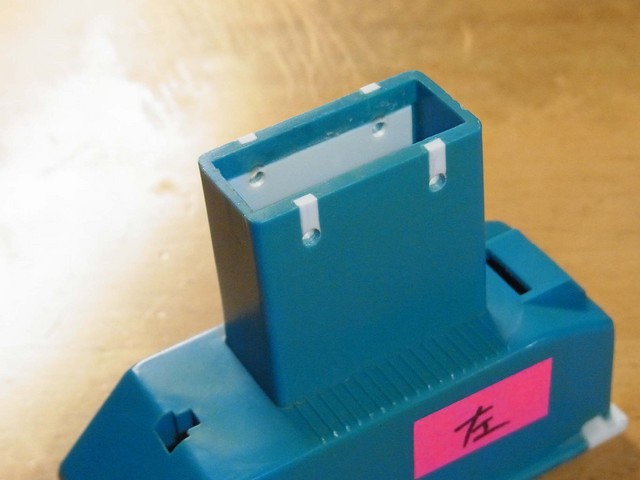
前の記事で補修した足の形のプラスチック部品の上側には、金属のリンクと結合するための穴がある。この穴は、単純にプラスチックの板に穴を開けた形ではなく、特殊な形になっている。言葉で説明するよりも、写真を見せた方が速いので、とりあえず、下の写真を見ていただきたい。

今、金型が上と下に分割される構造になっているとする。上と下が合わさった状態で隙間にプラスチックを注入し、冷えたら、型を上と下に割って製品を取り出す。製品の横に穴を作り込む場合は、型の横から棒を突っ込んだ構造にするのが普通なのだが、これをやると金型が複雑になってコストがあがる。だから上型と下型だけで穴が作れるような工夫がされているのである。
僕は仕事で、射出成型の部品を設計したことが何回かあるが、このような穴の開け方はやったことがない。賢いやり方だとは思うがデメリットもある。開口したいところと違う部分も肉を削いでしまうため、強度的に不利になるのだ。今回のものはピンの荷重がかかるところの厚さが1ミリに満たない。真正面から見ると、直径2.5ミリの穴が縦方向に伸び、4ミリまで広がってしまっている。分解する前に足がグラグラだった原因はこれだった。これだけ緩みがあると、歩くのに支障がでるだろう。
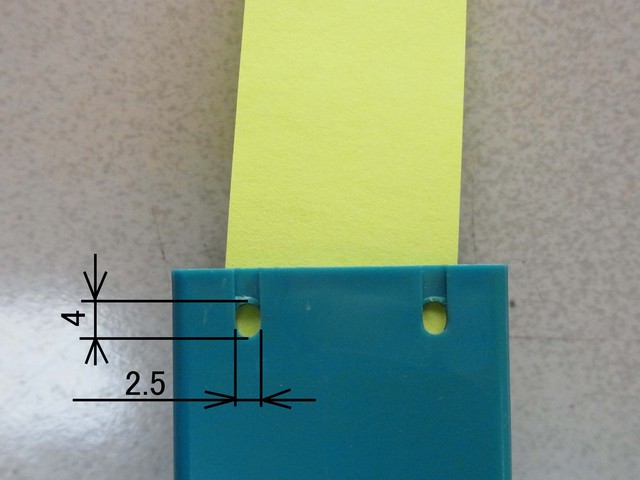
そういうわけでここも補修することにした。肉の必要なところにプラバンを貼って、φ2.5の穴を改めて開けた。
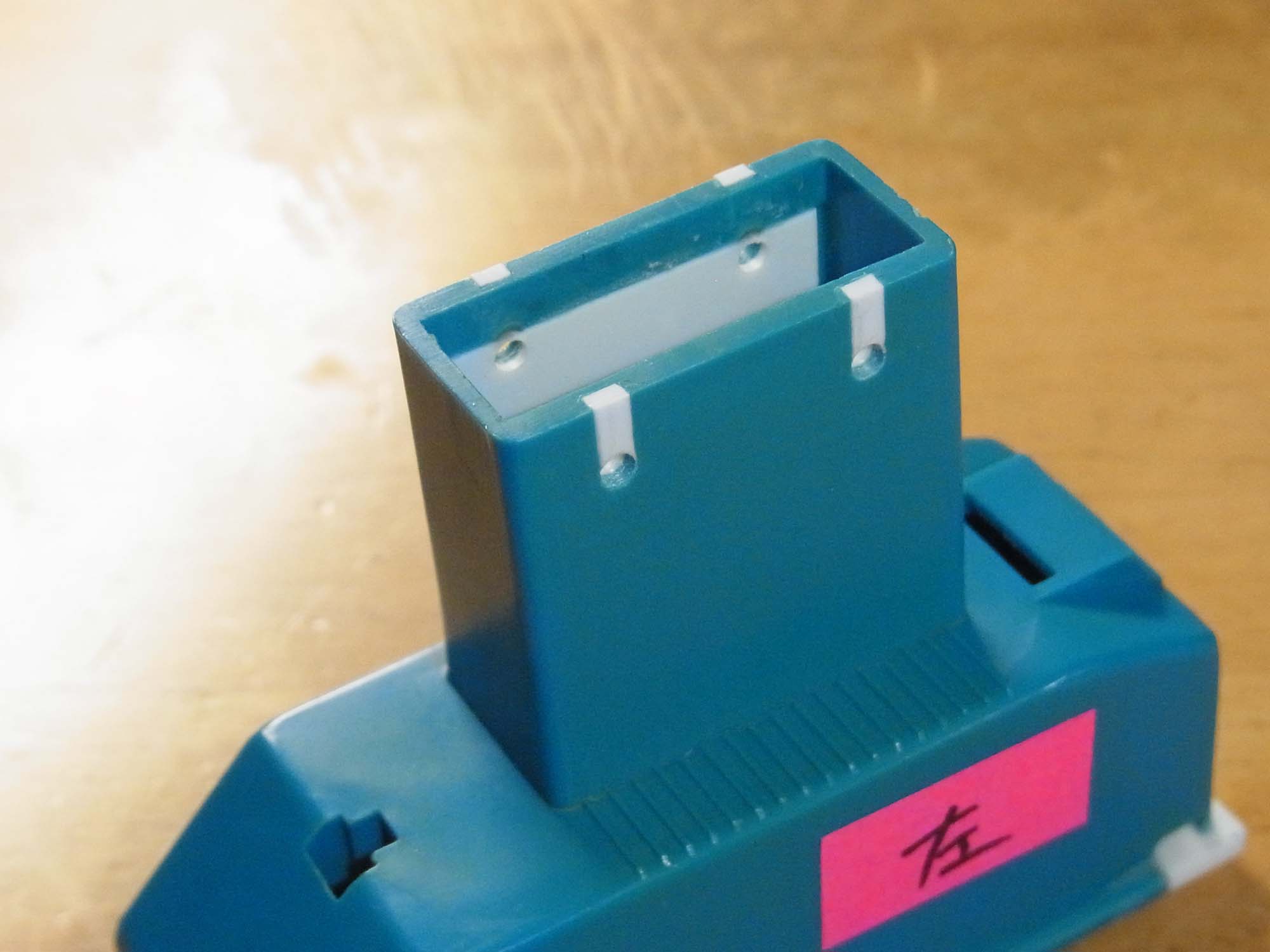
前の記事で補修した足の形のプラスチック部品の上側には、金属のリンクと結合するための穴がある。この穴は、単純にプラスチックの板に穴を開けた形ではなく、特殊な形になっている。言葉で説明するよりも、写真を見せた方が速いので、とりあえず、下の写真を見ていただきたい。

今、金型が上と下に分割される構造になっているとする。上と下が合わさった状態で隙間にプラスチックを注入し、冷えたら、型を上と下に割って製品を取り出す。製品の横に穴を作り込む場合は、型の横から棒を突っ込んだ構造にするのが普通なのだが、これをやると金型が複雑になってコストがあがる。だから上型と下型だけで穴が作れるような工夫がされているのである。
僕は仕事で、射出成型の部品を設計したことが何回かあるが、このような穴の開け方はやったことがない。賢いやり方だとは思うがデメリットもある。開口したいところと違う部分も肉を削いでしまうため、強度的に不利になるのだ。今回のものはピンの荷重がかかるところの厚さが1ミリに満たない。真正面から見ると、直径2.5ミリの穴が縦方向に伸び、4ミリまで広がってしまっている。分解する前に足がグラグラだった原因はこれだった。これだけ緩みがあると、歩くのに支障がでるだろう。
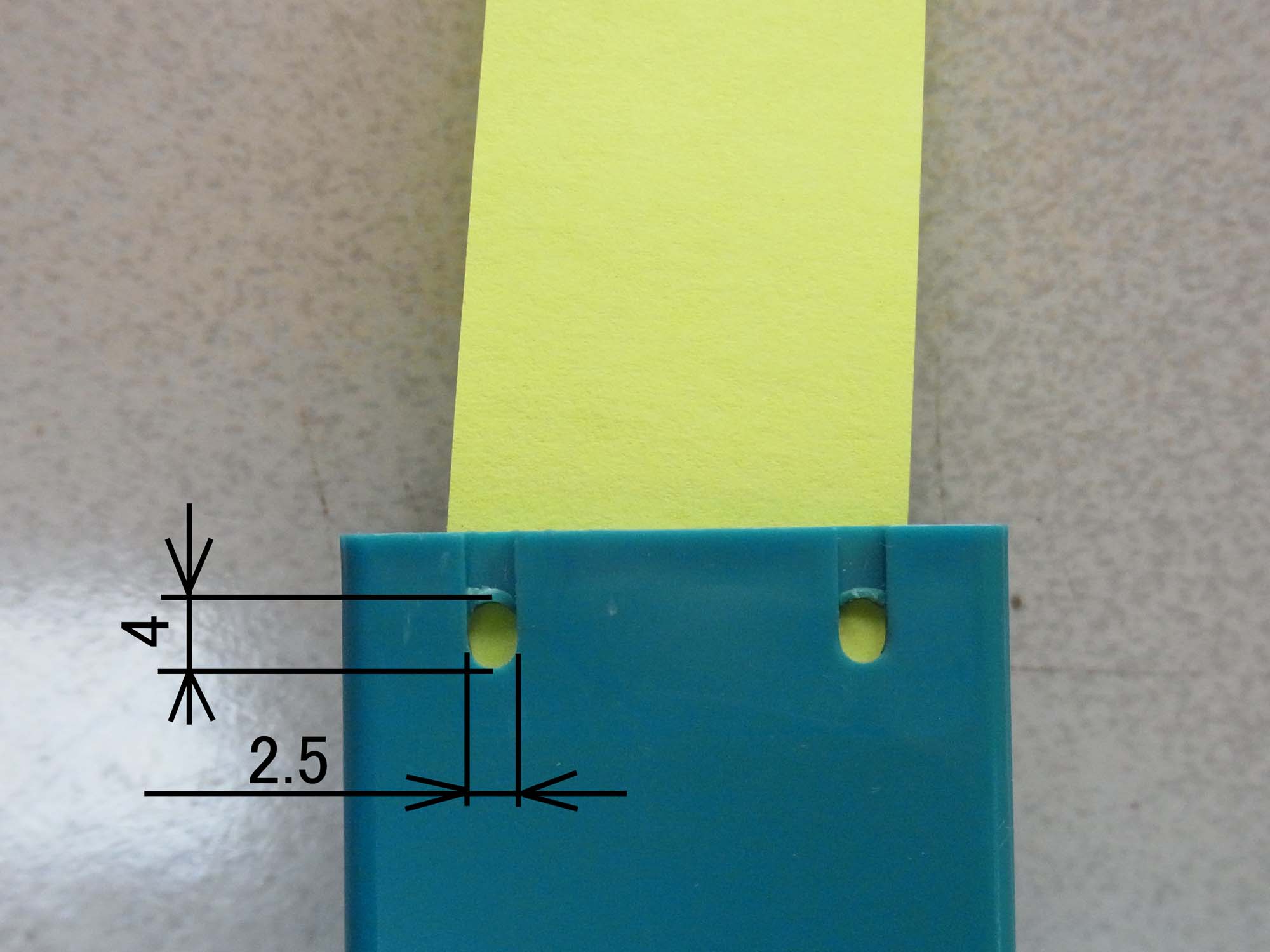
そういうわけでここも補修することにした。肉の必要なところにプラバンを貼って、φ2.5の穴を改めて開けた。

ホークⅢを作る

思い出のバイク、HONDA CB400N(HAWK Ⅲ)の製作にチャレンジ中。
ENZO FERRARI
初めての自動車モデル、エンツォ フェラーリを友人から依頼されて製作。
スズキRG250Γ

タミヤのRG250Γを作りながら、バイクにまつわる懐かしい思い出を発掘。
ホンダVF750F

ホンダVF750Fを作りながら、バイクにまつわる懐かしい思い出を発掘。
紫電

旧帝国海軍の局地戦闘機「紫電」。タミヤとハセガワのキットの比較研究。
「紅の豚」サボイアS21F

スタジオジブリの映画「紅の豚」のポルコの愛機サボイア。フィオが修理した後期形です。映画を観ながら製作を楽しみました。
F-14Aトムキャット

ハセガワの1/48「F-14Aトムキャット」。組立は終了し、あとはディスプレイを残すのみとなりました。アクリル製のスタンドを作って着艦直前のシーンを作る予定であります。



コメント 0