ロボット大回転レストア(16) [ロボット大回転]
【肩幅の調整】
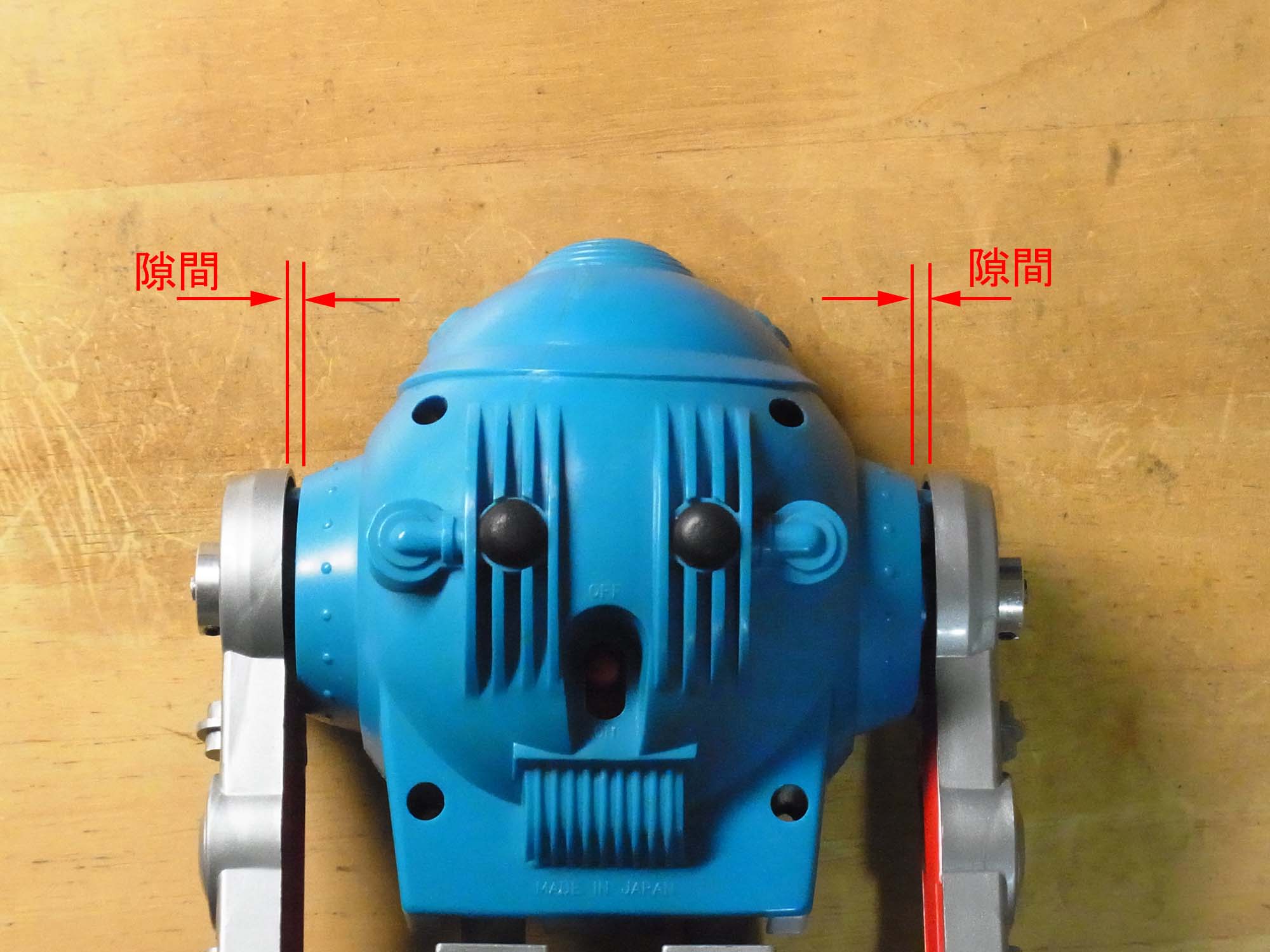
下の写真は、足の組立まで仕上がったものをボディの後ろ側にあてたところ。 肩幅が広めになっていて腕とボディの間の隙間が、結構空いている。
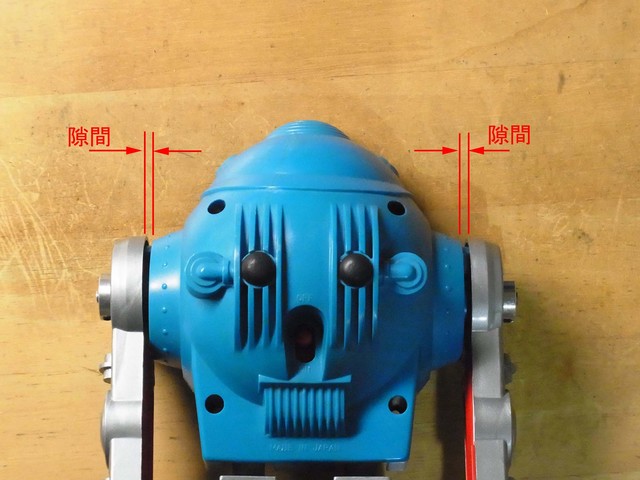
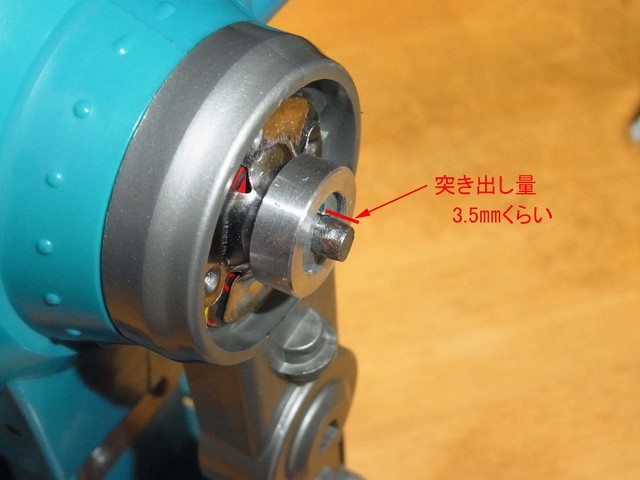
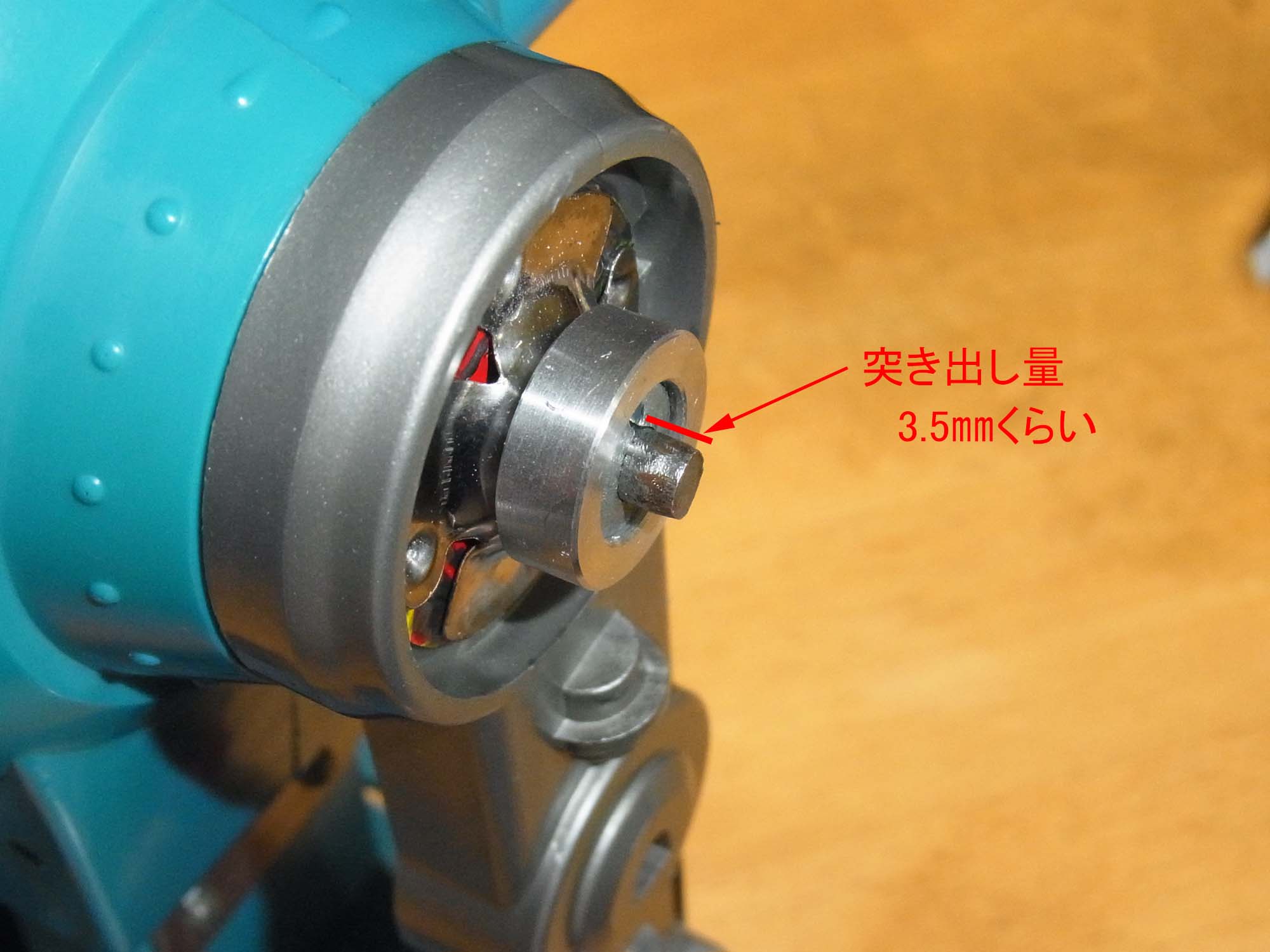
この隙間にはちょうどよい幅がある。狭すぎると過大トルク保護機構(注1)が働かない。逆に広すぎるとカムとカムフォロワー(注2)が噛み合わない。ちょうどよい幅にするためには、下の写真の部分、つまり圧入リングからの銅シャフトの突き出し量を3.5mmくらいにするとよいようだ。
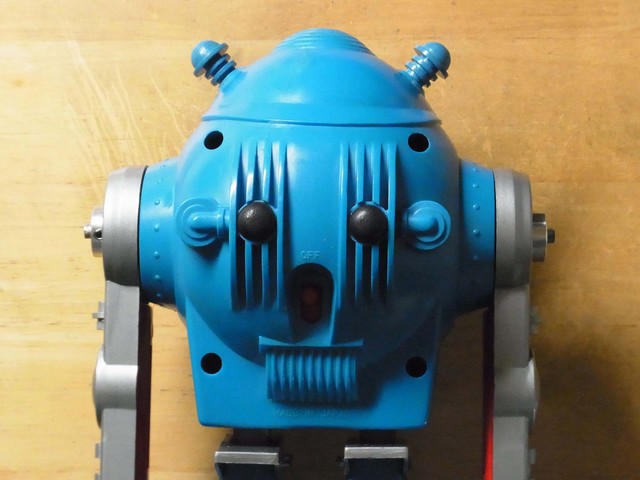
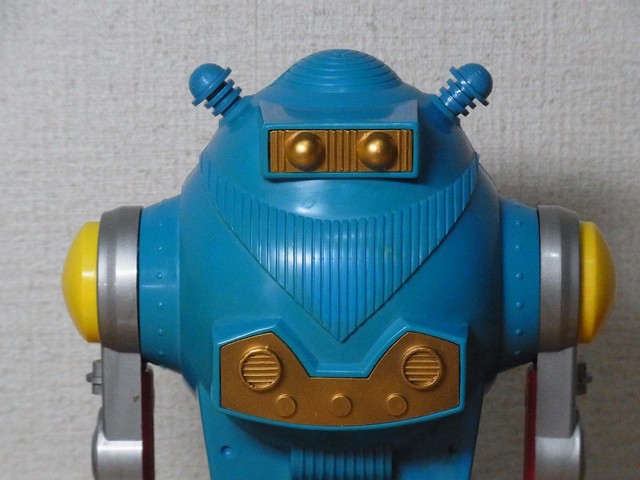
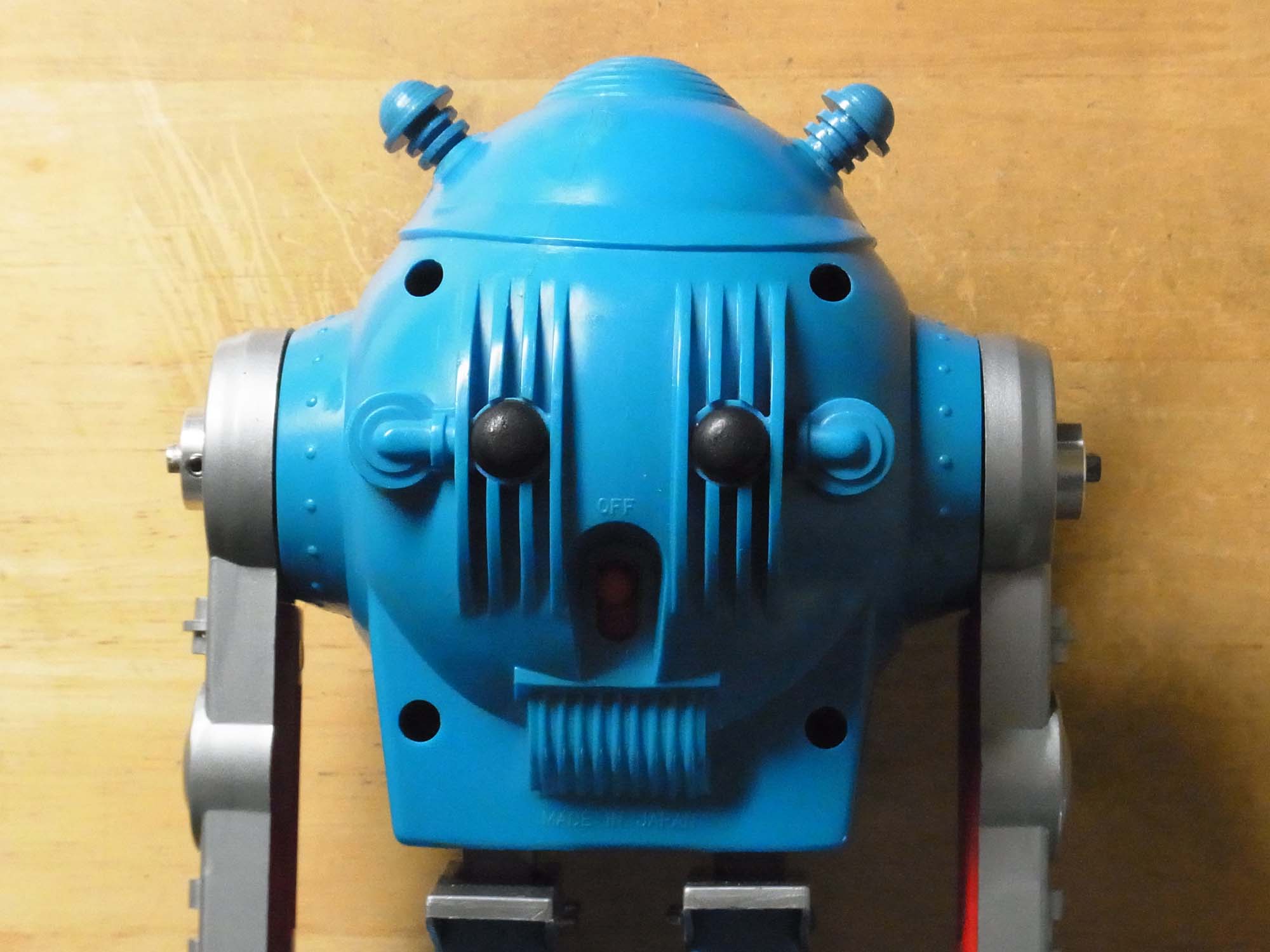
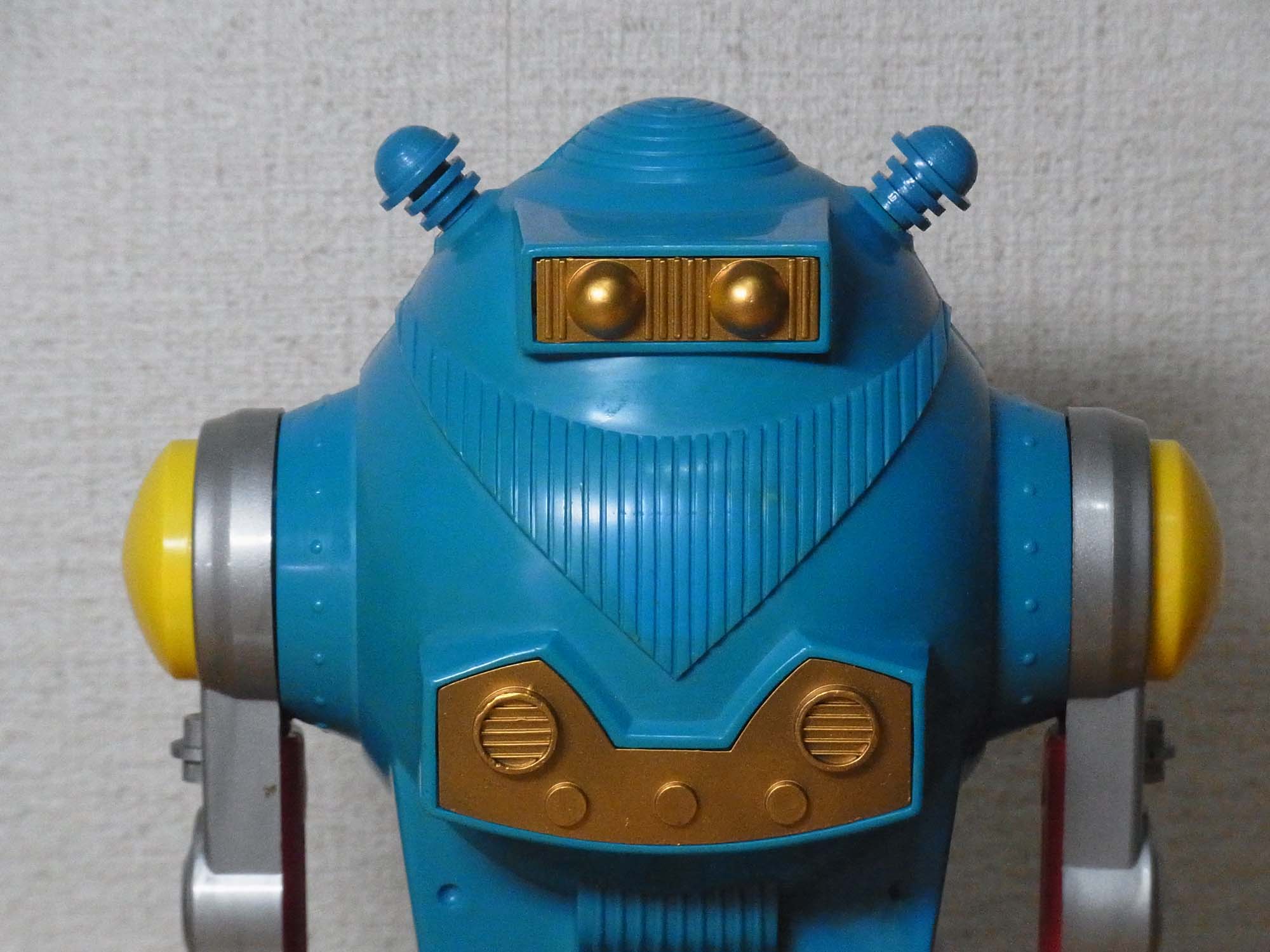
ボディをつけて肩カバーを付けて完成したのが下の写真。最初の状態と比較すると見違えるようだ。・・・というより知らない人が見たら間違いなく見違える。姿が全然違うのだから。

以前にお見せしたのと同じようなものになってしまうが、一応、動いた証拠としての動画をつけておく。元気に復活した姿を見て、「このロボット、20年も30年も倉庫で眠っていたんだろうな」などと想像してしまった。レストアできて感無量である。
***
(注1)過大トルク保護機構については下記を参照。
ロボット大回転レストア(5)
http://shonankit.blog.so-net.ne.jp/2018-02-07
(注2)カムとカムフォロワーについては下記を参照。
ロボット大回転レストア(4)
http://shonankit.blog.so-net.ne.jp/2018-02-06
下の写真は、足の組立まで仕上がったものをボディの後ろ側にあてたところ。 肩幅が広めになっていて腕とボディの間の隙間が、結構空いている。
この隙間にはちょうどよい幅がある。狭すぎると過大トルク保護機構(注1)が働かない。逆に広すぎるとカムとカムフォロワー(注2)が噛み合わない。ちょうどよい幅にするためには、下の写真の部分、つまり圧入リングからの銅シャフトの突き出し量を3.5mmくらいにするとよいようだ。
ボディをつけて肩カバーを付けて完成したのが下の写真。最初の状態と比較すると見違えるようだ。・・・というより知らない人が見たら間違いなく見違える。姿が全然違うのだから。

以前にお見せしたのと同じようなものになってしまうが、一応、動いた証拠としての動画をつけておく。元気に復活した姿を見て、「このロボット、20年も30年も倉庫で眠っていたんだろうな」などと想像してしまった。レストアできて感無量である。
***
(注1)過大トルク保護機構については下記を参照。
ロボット大回転レストア(5)
http://shonankit.blog.so-net.ne.jp/2018-02-07
(注2)カムとカムフォロワーについては下記を参照。
ロボット大回転レストア(4)
http://shonankit.blog.so-net.ne.jp/2018-02-06

ホークⅢを作る

思い出のバイク、HONDA CB400N(HAWK Ⅲ)の製作にチャレンジ中。
ENZO FERRARI
初めての自動車モデル、エンツォ フェラーリを友人から依頼されて製作。
スズキRG250Γ

タミヤのRG250Γを作りながら、バイクにまつわる懐かしい思い出を発掘。
ホンダVF750F

ホンダVF750Fを作りながら、バイクにまつわる懐かしい思い出を発掘。
紫電

旧帝国海軍の局地戦闘機「紫電」。タミヤとハセガワのキットの比較研究。
「紅の豚」サボイアS21F

スタジオジブリの映画「紅の豚」のポルコの愛機サボイア。フィオが修理した後期形です。映画を観ながら製作を楽しみました。
F-14Aトムキャット

ハセガワの1/48「F-14Aトムキャット」。組立は終了し、あとはディスプレイを残すのみとなりました。アクリル製のスタンドを作って着艦直前のシーンを作る予定であります。



コメント 0